

미국 코넬대 ,화성 탐사선 '퍼시비어런스',18일 "예제로 분화구(Jezero Crater)" 착륙 코넬의 우주선 행성 이미징 시설 과 코넬의 칼 세이건 연구소 오는18 일 오후 2시 30 분라이브중계
snsnews 2021. 2. 16. 17:58
아직 여행 할 수있는 거리가 100 만 마일도 안되고 남은 날이 남은 화성 2020 임무의 인내성 우주선은 우리 이웃의 붉은 행성으로가는 8 개월, 3 억 마일 여정의 마지막 구간을 시속 4만8,000 마일의 속도로 원활하게 우주를 통과합니다.
NASA와 JPL (제트추진연구소)에 따르면 우주선은 순조롭게 순항중이면 모든준비를 마쳤다고 했다.
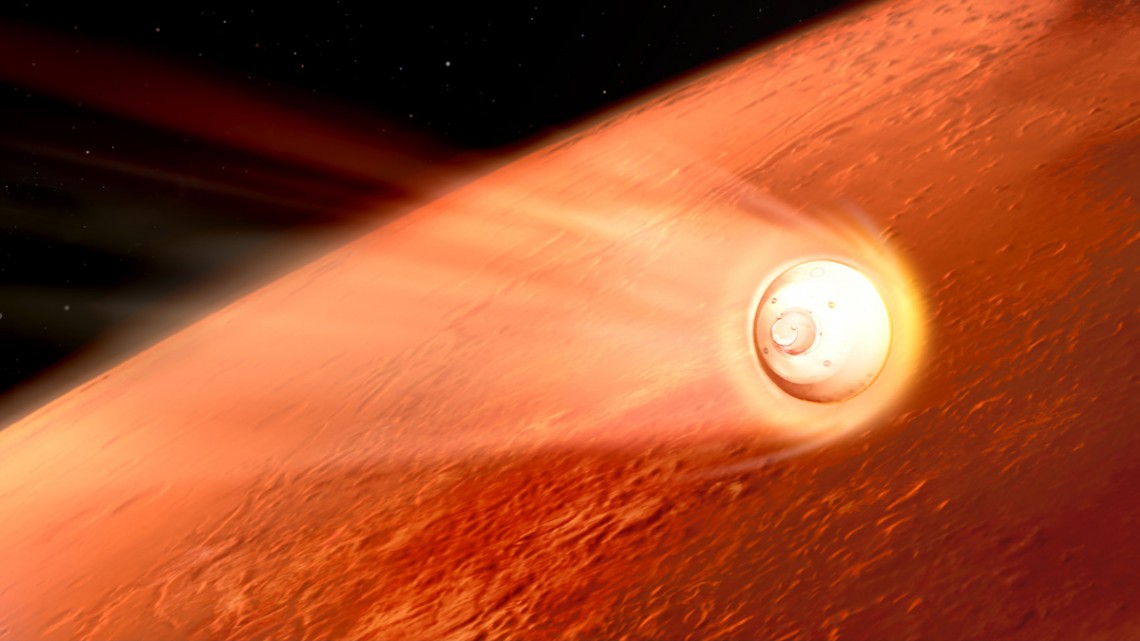
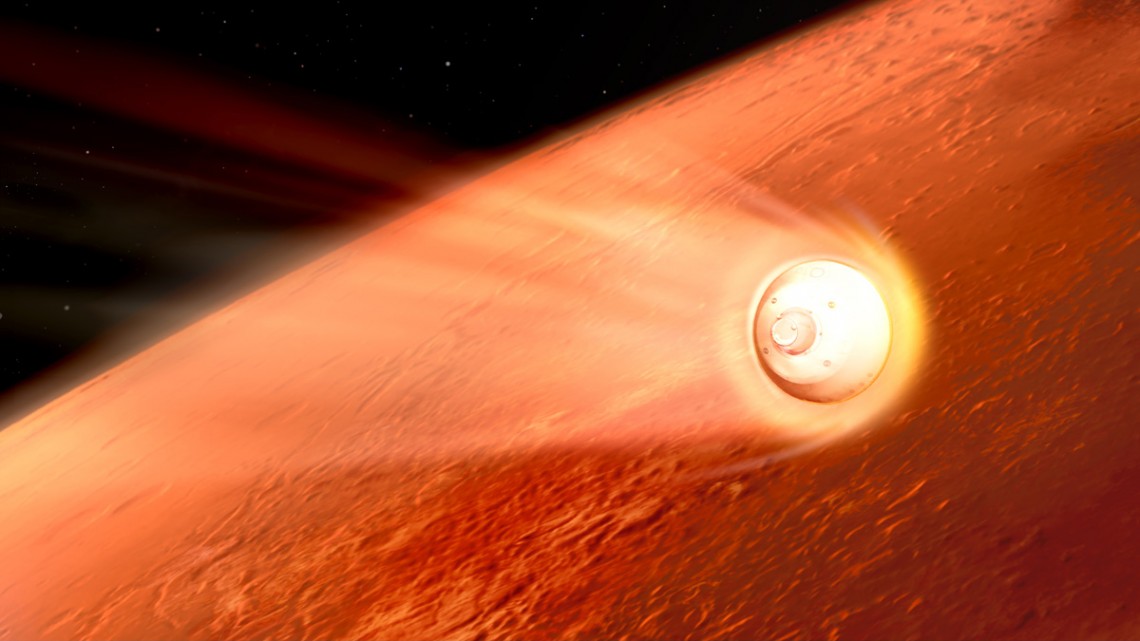
퍼시비어런스는 오는 18 일, 화성 대기의 정상에 진입해 고온과 7 분간의 끔찍한 주행을 견디고,예제로분화구에착륙할예정이다 .

한편 미국 코넬대에 따르면 코넬의 우주선 행성 이미징 시설 과 코넬의 칼 세이건 연구소 가 2 월 18 일 오후 2시 30 분부터 4시 30 분까지 주최 하는 "화성 2020 상륙 라이브 시계 파티"를 온라인 으로 코넬 리언 스와 함께 하세요. 퍼시비어런스 착륙 시퀀스는 EST 오후 3시 45 분에 시작돼, 오후 3:53에 터치 다운 예정이다
코넬 연구원들은 출시 이후 8 개월 동안이 날을 준비했다.고 덧붙였다
알렉스 헤이즈 코넬대 예술 과학 대학 천문학 부교수 는 은 로버의 확대 / 축소 가능한 마스트 장착 카메라 시스템 인 Mastcam-Z의 공동 조사자이다. 그와 그의 팀은 Mastcam-Z 방사성 보정 파이프 라인을 마무리해 카메라가 착륙시 정상작동을 점검했다..
헤이즈는 "우리는 제트엔연구소에서 로버의 엔지니어링 모델을 사용해 모의 임무를 수행하면서 작전 훈련을 해왔습니다. 모든 원격 작전 역할에 대한 문제를 해결했다."라며"화성 환경은 실험실에서 재현하기가 매우 어렵 기 때문에 일부 기기 교정 활동은 착륙 할 때까지 기다려야된다."라고 그는 말했다. "착륙 후 팀이 가장 먼저 할 일 중 하나는 출시 전 기기 교정을 검증하고 업데이트하기 위해 데이터를 수집하는 것이다."

NASA의 탐사선 Perseverance는 화성의 현재 건조한 Jezero Crater에 착륙 할 것입니다. 이 예술적 렌더링은 수십억 년 전의 모습을 보여준다.
인제 력과 함께 탐사선의 하복부에 보관 된 소형 헬리콥터 인 Ingenuity가 제공된다.
우주선은 수십억 년 된 강망의 끝에있는 고대 호수 유역 인 Jezero 분화구에 착륙한다.
고대 강 삼각주와 그 주변을 조사하는 동안 탐사선의 샘플 및 캐싱 시스템은 토양과 암석 유형을 수집하고 샘플을 지구로 반환하는 후속 임무를 준비한다.
Perseverance 로버는 세 가지 주요 임무 단계 중 첫 번째 단계입니다. "우리의 임무는 Jezero에 착륙하고, 환경을 식별하고, 컨텍스트를 제공하고, 결국 지구로 다시 가져올 샘플을 캐시하는 것입니다."라고 Hayes는 말했다. “이것은 실제로 훨씬 더 큰 노력의 시작이다. 단순한 미션이 아니라 캠페인의 시작이다.”
유럽 우주국 (ESA)의 샘플 가져 오기 로버는 2028 년 8 월에 Jezero에 착륙해 약병을 회수 할 예정이며,이 약병은 NASA가 설계 한 화성 상승 차량에 넣고 화성 궤도로 발사된다.
세 번째 임무는 화성의 궤도에서 샘플을 가져 와서 연구를 위해 지구로 가져갈 것이다.
NASA의 지구 진입 차량과 함께 ESA에서 제작 한 지구 복귀 궤도 선은 2032 년 봄에 샘플을 지구로 전달합니다.
애리조나 주립 대학의 천문학 교수이자 코넬의 천문학 (A & S) 겸임 교수 인 Jim Bell은 Perseverance의 Mastcam-Z의 수석 조사자이다.
Cornell에있는 동안 그는 Spirit and Opportunity 로버에서 파노라마 카메라 또는 PanCam의 수석 조사자로 근무했다.
Mastcam-Z 팀의 Hayes에 합류 한 Cornellians는 선임 연구원 (A & S) 인 Rob Sullivan의 공동 조사자이다.
박사 과정 학생 Megan Barrington, 농업 및 생명 과학 대학 지구 및 대기 과학, 천학 Christian Tate; 및 Paul Corlies, Ph.D. Mastcam-Z의 입체 및 다중 스펙트럼 카메라 보정을 도왔던 '19.공동 조사자 인 코넬 (A & S)의 수석 연구원 인 Don Banfield는 풍속, 온도, 습도 및 화성 대기의 먼지 입자 크기를 측정하는 기기 인 화성 환경 역학 분석기 (MEDA)를 연구하고 있다.
Banfield는 또한 착륙 후 탐사 전략을 결정한 그룹을 이끌 기 위해 두드린 공동 조사자 중 한 명인 장기 계획자이기도하다. Sullivan은 MEDA 팀의 일원이기도하다.
Cornell (A & S)의 수석 연구 과학자 인 Mike Mellon은 화성 표면 아래를 조사하는 데 사용될 화성 지하 실험용 레이더 이미 저 (RIMFAX)의 공동 조사자이다.
레이더 이미지는 샘플 된 암석 노두에 대한 컨텍스트를 제공하고이 지역의 매장 된 지질 학적 역사에 대한 고유 한보기를 제공한다.
퍼시비어런스 (탐사차)
위키백과, 제공 퍼시비어런스 로버Perseverance Rover작가의 예상도임무 정보관리 기관NASA임무 유형화성 탐사COSPAR ID2020-052ASATCAT №45983발사일2020년 7월 30일, 오전 11시 50분 (UTC)발사체아틀라스 V[1]발사 장소케이프커내버럴 공군기지접근 천체지구, 달, 화성, 포보스, 데이모스목표 천체화성착륙일2021년 2월 18일착륙 장소화성 제지로 크레이터임무 기간1년(화성 기준)[2]우주선 정보제조 기관JPL승무원무인탑재체탑재체퍼시비어런스인제뉴어티프로그램탐사선 문양 퍼시비어런스(Perseverance)는 화성 탐사선으로 2020년 7월 30일 발사하였다.[3] 화성의 생명체 거주 여부, 화성의 고대 환경 조사, 화성 지표의 역사 등을 밝히는 것이 이 탐사선의 목표다.[4][5] 더불어 중요한 목표는 미래의 인류가 화성을 유인 탐사할 때 위험한 것이 없는지 탐색하고, 대기의 조성을 알려주어 미래의 기지를 건설하는 데 도움을 주는 것이다.[6] 또 인간이 어떤 조건으로 착륙해야 되는지 등을 탐색한다.[7] 예산은 원래 15억 달러를 배정했는데,[8] 지금은 더 늘어나서 25억 달러다.[9] 특이사항으로는 인사이트가 MarCO과 화성에 함께 가는 것과 비슷하게 인제뉴어티와 함께 발사된다. 또한 큐리오시티의 디자인을 많이 재사용했다. 따라서 새로운 기술보다는 이전 로버들의 좋은 점을 합친 것이라고 보면 된다. 참고로, 마스 2020(Mars 2020)은 퍼시비어런스와 인제뉴어티 드론 헬리콥터를 포함한, NASA의 화성 지표면 로봇 탐사 계획의 명칭이다.
페이로드(장비)[편집]
설계도.
FIXL : X선 분광기로, 화성의 흙의 성분을 분석할 예정이다.[47][48]
RIMFAX : 지하 질량 분석 레이다로 10m 이내에 있는 화성 지하의 구성 성분, 물 등을 탐색할 예정이다.[49][50][51]
MEDA : qq화성의 날씨를 기록&측정하는 장비로 화성의 기온, 풍속, 기압, 화성 먼지 등을 측정할 예정이다. 스페인 국립 연구 위원회 제작 예정이다.[52]
MOXIE : 화성의 대기의 주요 구성 성분인 이산화탄소를 산소로 바꾸는 장치다.[53] 미래에 인류가 화성에 거주하는데 필요한 산소 교환 장치의 시범 가동이 목표이다.[54] 그리고 이 탐사선의 과학 관련 부품들중 핵심 부품이라고 할 수 있다.
SuperCam : 질량분석기로, 화성의 간헐천에 있는 미네랄, 산소, 탄소, 질소 등을 발견하고 검출할 수 있다. 큐리오시티와 비슷하나 약간 다르다.[55]
MASTCAM-Z : 주변 풍경을 줌으로 찍는 게 목적이다. 말린 우주 센터가 제작한다.[56]
SHERLOC : 자외선으로 인간이 살기 좋은 곳을 찾는 것이 목표다.[57][58]
Ingenuity : 인제뉴어티는 탐사선의 일종의 네비게이션 역할이다.[59] 하루에 3분, 600m 이상 상공에서 날지 못한다.[60] 화성의 대기를 자세히 탐사하는 것이 주 목표이고[61] 정확한 탐사 개념은 2018년 5월 발표되었다.[62][63][64][65]
로봇 팔 : 샘플을 수집하고 탐사 대상을 로버로 끌어오는 등의 역할을 할 예정이다.[66]
착륙장소[편집]
착륙장소는 2017년 켈리포니아에서 착륙장소 후보 8곳이 정해졌다.[67] 이후 켈리포니아에서 다시 3개의 최종 착륙 장소 후보가 정해졌다.[68]
결국 착륙지는 3곳 중 제지로 크레이터로 결정되었다.
화성의 돌[편집]
마스 2020에 샘플 캐쉬에 있는 화성의 돌
NASA는 퍼시비어런스에게 화성을 탐사하는 의미로 샘플 캐쉬에 화성의 암석을 하나 넣었다.[69]
